Oglas
Hkratna lokalizacija in preslikava (SLAM) verjetno nista vsakdanja besedna zveza. Vendar pa nekaj najnovejših tehnoloških čudežev uporablja ta postopek vsako milisekundo svoje življenjske dobe.
Kaj je SLAM? Zakaj ga potrebujemo? In o katerih teh kul tehnologijah govorite?
Od kratice do abstraktne ideje
Tu je kratka igra za vas. Katera od teh ne spada?
- Samovozeči avtomobili
- Aplikacije razširjene resničnosti
- Avtonomna letalska in podvodna vozila
- Nosilci mešane resničnosti
- Roomba
Morda mislite, da je odgovor zlahka zadnja točka na seznamu. Na nek način imate prav. Na drug način je bila to igra z zvijačo, saj so vsi ti predmeti povezani.

Pravo vprašanje (zelo kul) igre je naslednje: Kaj naredi vse te tehnologije izvedljive? Odgovor: hkratna lokalizacija in preslikava ali SLAM! kot pravijo kul otroci.
Na splošno je namen algoritmov SLAM dovolj enostaven za ponovitev. Robot bo hkrati uporabil lokalizacijo in preslikavo, da bo ocenil svoj položaj in orientacijo (ali postavitev) v prostoru, medtem ko bo ustvaril zemljevid svojega okolja. To omogoča robotu, da ugotovi, kje je in kako se premikati po neznanem prostoru.
Torej, da, to pomeni, da vse to algoritem domišljavega števila dela, je ocena položaja. Druga priljubljena tehnologija, Globalni sistem za določanje položaja (ali GPS) Kako deluje sledenje GPS in kaj lahko spremljate?GPS. Poznamo ga kot tehnologijo, ki nas vodi od A do B. Toda GPS je več kot to. Obstaja svet možnosti in ne želimo, da ga zamudite. Preberi več je ocenjeval položaj od prve zalivske vojne v devetdesetih letih.
Razlikovanje med SLAM in GPS
Zakaj torej potreba po novem algoritmu? GPS ima dve prirojeni težavi. Prvič, medtem ko je GPS natančen glede na svetovno lestvico, tako natančnost kot natančnost zmanjšujeta lestvico glede na sobo ali mizo ali majhno križišče. GPS ima natančnost do metra, ampak kakšen centimeter? Milimetrski?
Drugič, GPS ne deluje dobro pod vodo. Saj ne mislim, da sploh ne. Podobno je delovanje pegasto v stavbah z debelimi betonskimi stenami. Ali v kleteh. Idejo dobite. GPS je satelitski sistem, ki trpi zaradi fizičnih omejitev.
Zato algoritmi SLAM želijo izboljšati občutek položaja za naše najbolj napredne pripomočke in stroje.
Te naprave že imajo litanijo senzorjev in perifernih naprav. SLAM algoritmi uporabljajo podatke iz čim večjega števila le-teh z uporabo neke matematike in statistike.
Piščanca ali jajca? Položaj ali zemljevid?
Matematika in statistika sta potrebni za odgovor na zahtevno zahtevo: ali se položaj uporablja za izdelavo zemljevida okolice ali se zemljevid okolice uporablja za izračun položaja?
Premišljen čas eksperimenta! Vi ste meddimenzionalno izkrivljeni v neznano mesto. Kaj je prva stvar, ki jo naredite? Panika? V redu, umirite se, vdihnite. Vzemi drugega. Zdaj, kaj je drugo, kar počneš? Poglejte okoli sebe in poskusite najti nekaj znanega. Stol je na vaši levi strani. Rastlina je na vaši desni strani. Kava miza je pred vami.
Nato naslednji paralizirani strah "Kje za vraga sem?" se izmuzne, začnete se premikati. Počakajte, kako deluje gibanje v tej dimenziji? Naredite korak naprej. Stol in rastlina sta vse manjša, miza pa večja. Zdaj lahko potrdite, da se pravzaprav premikate naprej.
Pripombe so ključne za izboljšanje natančnosti ocene SLAM. V spodnjem videoposnetku, ko se robot premika od označevalca do označevalca, ustvari boljši zemljevid okolja.
Vrnite se k drugi dimenziji, bolj ko se sprehajate, bolj se orientirate. Korak v vse smeri potrjuje, da je gibanje v tej dimenziji podobno dimenziji vašega doma. Ko greste desno, rastlina še večji. V pomoč je, da vidite druge stvari, ki jih v tem novem svetu prepoznate kot mejnike, ki omogočajo bolj samozavestno potepanje.
To je v bistvu proces SLAM-a.
Vhodi v proces
Za izdelavo teh ocen algoritmi uporabljajo več podatkov, ki jih je mogoče razvrstiti kot notranje ali zunanje. Za vaš primer meddimenzionalnega prevoza (priznajte, imeli ste zabavno potovanje), so notranje meritve velikost korakov in smeri.
Zunanje meritve so v obliki slik. Prepoznavanje mejnikov, kot so rastlina, stol in miza, je lahka naloga za oči in možgane. Najmočnejši znani procesor - človeški možgani - je sposoben posneti te slike in ne samo prepoznati predmetov, ampak tudi oceniti razdaljo do tega predmeta.
Na žalost (ali na srečo, odvisno od vašega strahu pred SkyNetom) roboti nimajo človeških možganov kot procesor. Stroji se kot možgani zanašajo na silikonske čipe s človeško pisno kodo.
Ostali stroji izvajajo zunanje meritve. Pri tem so koristne periferne naprave, kot so žiroskopi ali druga inercijska merilna enota (IMU). Roboti, kot so samovozeči avtomobili, uporabljajo tudi meritev odometrije položaja koles kot notranjo meritev.

Zunaj avtomobil z lastno vožnjo in drugi roboti uporabljajo LIDAR. Podobno kot radar uporablja radijske valove, tudi LIDAR meri svetlobne impulze, da prepozna razdaljo. Uporabljena svetloba je običajno ultravijolična ali blizu infrardečega, podobno kot infrardeči senzor globine.
LIDAR pošlje več deset tisoč impulzov na sekundo, da ustvari izredno visoko ločljiv tridimenzionalni zemljevid oblakov. Torej, ja, naslednjič, ko se bo Tesla vrtel na avtopilotu, vas bo ustrelil z laserjem. Velikokrat.
Poleg tega algoritmi SLAM uporabljajo statične slike in tehnike računalniškega vida kot zunanjo meritev. To se naredi z eno samo kamero, lahko pa je s stereo parom še natančnejše.
Znotraj črne škatle
Notranje meritve bodo posodobile ocenjeni položaj, ki ga je mogoče uporabiti za posodobitev zunanje karte. Zunanje meritve bodo posodobile ocenjeno karto, ki jo lahko uporabite za posodobitev položaja. To si lahko predstavljate kot težavo pri sklepanju in ideja je najti optimalno rešitev.
Pogost način za to je verjetnost. Tehnike, kot sta filter delcev, približen položaj in preslikava z uporabo Bayesovega statističnega sklepanja.
Filter za delce uporablja določeno število delcev, razporejenih z Gaussovo porazdelitvijo. Vsak delček "napoveduje" trenutni položaj robota. Vsakemu delcu je verjetnost dodeljena. Vsi delci se začnejo z isto verjetnostjo.
Ko se izvedejo meritve, ki se med seboj potrjujejo (na primer korak naprej = večja tabela), so delci, ki so v svojem položaju "pravilni", postopno deležni boljše verjetnosti. Delcem, ki so oddaljeni, so dodeljene manjše verjetnosti.
Več ko se lahko robot prepozna, boljše je. Točke zagotavljajo povratne informacije o algoritmu in omogočajo natančnejše izračune.
Trenutne aplikacije z algoritmi SLAM
Razčlenimo to, kul del tehnologije, s kul kosom tehnologije.
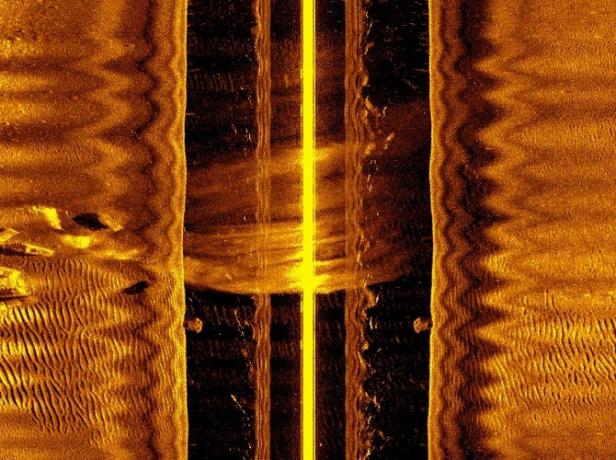
Avtonomna podvodna vozila (AUV)
Brezpilotne podmornice lahko delujejo samostojno z uporabo tehnik SLAM. Notranji IMU zagotavlja podatke o pospešku in gibanju v treh smereh. Poleg tega AUV-ji uporabljajo sonar, ki je obrnjen od spodaj, za oceno globine. Stranski sonar za skeniranje ustvarja slike morskega dna z dosegom nekaj sto metrov.
Nosilci mešane resničnosti
Microsoft in Magic Leap sta ustvarila nosljiva očala, ki jih predstavljajo Aplikacije mešane resničnosti Windows Mešana resničnost: kaj to je in kako poskusiti zdajWindows Mixed Reality je nova funkcija, ki omogoča uporabo sistema Windows 10 v navidezni in razširjeni resničnosti. Tukaj je razburljivo in kako ugotoviti, ali vaš računalnik to podpira. Preberi več . Ocenjevanje položaja in izdelava zemljevida je ključnega pomena za te nosilne pripomočke. Naprave uporabljajo zemljevid, da navidezne predmete postavijo na resnične predmete in jih medsebojno uporabljajo.
Ker so te nosilnosti majhne, ne morejo uporabljati velikih perifernih naprav, kot sta LIDAR ali sonar. Namesto tega se za preslikavo okolja uporabljajo manjši senzorji globine in infrardeče kamere.
Samovozeči avtomobili
Avtonomni avtomobili imajo malce prednost pred nosilnostjo. Z veliko večjo fizično velikostjo lahko avtomobili sprejmejo večje računalnike in imajo več zunanjih naprav za izvajanje notranjih in zunanjih meritev. Avtomobilski avtomobili v marsičem predstavljajo prihodnost tehnologije, tako v smislu programske kot strojne opreme.
Tehnologija SLAM se izboljšuje
Ker se tehnologija SLAM uporablja na več različnih načinov, je le vprašanje časa, kdaj se bo izpopolnila. Ko se vsak dan vidijo samovozeči avtomobili (in druga vozila), boste vedeli, da sta hkratna lokalizacija in preslikava pripravljena za uporabo vseh.
Tehnologija samovoze se vsak dan izboljšuje. Želite vedeti več? Oglejte si podrobno razčlenitev MakeUseOfa kako delujejo samovozeči avtomobili Kako delujejo samovozeči avtomobili: matice in vijaki za Googlovim programom avtonomnih avtomobilovSposobnost potovanja naprej in nazaj v službo med spanjem, prehranjevanjem ali dohitevanjem najljubšega blogi je koncept, ki je prav tako privlačen in na videz daljnosežen in dejansko futurističen zgoditi. Preberi več . Morda bi vas tudi zanimalo kako hekerji ciljajo na povezane avtomobile.
Kreditna slika: chesky_w /depositphotos
Tom je inženir programske opreme s Floride (kriči na Florida Man) s strastjo do pisanja, kolidžnega nogometa (pojdite Gators!), CrossFit in Oxfordskih vejic.